

Linear Algebra Notes
1 Algebra of Matrices
1.1 Definition
Definition 1 A m × n matrix A is a table with m rows and n columns written:
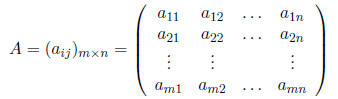
where the (ij)th element of A is

Definition 2 Two matrices A and B are said to be equal (A = B) if and
only if they have the
same number of rows and columns m × n, and
for all i = 1, . . . ,m and j = 1, . . . , n.
1.2 Addition
Definition 3 Matrix addition: If
 or
or

Theorem 1 If A, B, C are m × n matrices, then
A + B = B + A
and
(A + B) + C = A + (B + C)
Definition 4 The zero matrix (0)m×n is the m × n matrix where each entry
is 0. When the size
of the matrix is understood, the zero matrix is sometimes simply written as 0.
1.3 Scalar multiplication
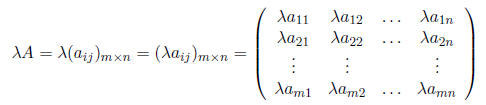
Definition 5 Scalar multiplication: If λ is a scalar and A a m × n matrix, then
Theorem 2 If
 are scalars and A,B are m × n matrices, then
are scalars and A,B are m × n matrices, then
1.4 Matrix multiplication
Definition 6 Matrix multiplication: If
 then the product AB is a
then the product AB is a
m × p matrix where

Remark 1 In general, AB ≠ BA.
Remark 2 If A is an m × n matrix, then

Remark 3 It is possible for AB = 0 with A ≠ 0 and B ≠ 0.
Theorem 3 A(BC) = (AB)C
Theorem 4 A(B + C) = AB + AC and (B + C)A = BA + CA.
Theorem 5 If λ is a scalar and AB is defined, then λ(AB) = (λA)B = A(λB).
Definition 7 The n × n matrix I or In×n defined by
is called the identity matrix.
Theorem 6 AI = IA = A.
Definition 8 A matrix D is called diagonal if it is a scalar multiple of the indentity matrix:

Definition 9 If AB = BA then A and B are said to commute.
1.5 Transpose
Definition 10 If A is a m×n matrix, the transpose of A, written AT or
A' is the n×m matrix
where
Theorem 7 The following properties hold for matrix transpose
operations, where A and B are
matrices of appropriate dimensions:
Definition 11 A matrix A is symmetric if A = AT , and skew-symmetric if A = −AT .
Remark 4 If A is a square matrix, then the matrix A+AT is
symmetric, and the matrix A−AT
is skew-symmetric.
1.6 Inverse
Definition 12 The inverse of the square matrix A is a matrix A-1 such that

If A has an inverse, it is said to be invertible.
Remark 5 Not all square matrices are invertible.
Remark 6 If A and B are invertible, then

since
Remark 7 If A is invertible, then
Definition 13 A square matrix A is called orthogonal if A-1 = AT .
Definition 14 The rotation matrix
Remark 8 If (x, y) represent coordinates of a point or vector in the plane, then
rotates (x, y) by θ.
Remark 9 The rotation matrix Rθ is orthogonal.
2 Vector Spaces
2.1

Definition 15 The vector space
is the set of ordered n-tuples of real numbers
 ,
,
where addition is defined by

and scalar multiplication is defined by

with the zero element 0 = (0, . . . , 0).
Remark 10 The vector space
can be also represented as the set of n × 1 matrices (column
vectors)

or 1 × n matrices (row vectors)

where
 are real numbers.
are real numbers.
For example, the vector space R2 is the set of ordered pairs (x, y) where x, y
are real numbers.
Geometrically, this represents the xy-plane. The vector space R3 is then the
3-dimensional space
of real numbers (x, y, z), etc.
Definition 16 A set of vectors
 in the vector space
are linearly independent if
in the vector space
are linearly independent if
the only way for the equation

to hold is if the scalars
 Otherwise, the set of vectors is called linearly
Otherwise, the set of vectors is called linearly
dependent.
In R2, the set {(1, 0), (0, 1)} is linearly independent, while the
sets {(1, 2), (3, 6)} and {(1, 0), (0, 1), (0, 2)}
are linearly dependent.
Definition 17 The dimension of a set of vectors
is the maximum number of linear
independent vectors in the set.
2.2 Linear transformations
Definition 18 A linear transformation T from the vector space

is a linear function from
Remark 11 A m × n matrix is an example of a linear transformation from
the vector space
: the matrix takes column vectors from
and gives back a vector in
 .
We can think of
.
We can think of
a m × n matrix as n column vectors of length m stacked side by side.
Definition 19 The kernel or null space of a linear transformation
 ,
written ker(T),
,
written ker(T),
is the set of all vectors
 in Rm such that
in Rm such that

Definition 20 The rank of a m×n matrix
 ,
where each
,
where each
 is a m×1 column
is a m×1 column
vector, is the dimension of its set of column vectors
 .
.
3 The Determinant
3.1 Definition
Consider the m×n matrix A and define the (m−1)×(n−1) submatrix
 as the matrix obtained
as the matrix obtained
from A by deleting the ith row and jth column. For example, if
then the submatrix
 is obtained by deleting the second row and second column:
is obtained by deleting the second row and second column:
We will define the determinant of a matrix recursively, by first defining the determinant of a number
Definition 21 The determinant of a 1 × 1 matrix A = (a11) is
Definition 22 The determinant of a n × n matrix A is

Using this, we can write down the determinant of a 2 × 2 matrix as

and a 3 × 3 matrix as

Note that so far we are expanding the determinants along the first row. The
general definition of
the determinant, however, allows us to expand along any row or column.
Definition 23 For any fixed row index i, the determinant of a n × n matrix A is
Definition 24 For any fixed column index j, the determinant of a n × n matrix A is
For example, we can write the determinant of a general 3×3 matrix by
expanding along the second
column:

Note that all three definitions of the determinant are equivalent, and thus will give the same result.
3.2 Properties
Definition 25 A square matrix is called upper triangular is all of the
matrix elements below the
diagonal are zero, and lower triangular is all of the matrix elements above the
diagonal are zero.
Remark 12 The determinant of a triangular (upper or lower) matrix is
equal to the product of
the diagonal elements.
Theorem 8 If A and B are n × n matrices, then det(AB) = det(A)det(B).
Remark 13 Combining these two results, we have

Remark 14 det(AT) = det(A).
3.3 Computing the matrix inverse
Recall the definition above for the submatrix Aij obtained from the matrix A by
deleting the ith
row and jth column.
Theorem 9 If A is a n × n matrix and det(A) ≠ 0, then matrix elements of A-1 are:

Thus, the determinant provides a way to tell if a matrix is invertible or not.
Corollary 10 A n × n matrix A is invertible if and only if det(A) ≠ 0.
For example, the inverse of a 2 × 2 matrix
can be computed by
as long as ad − bc ≠ 0.
4 Complex numbers
4.1 Properties
Definition 26 A complex number z is a number of the
form z = x + iy where x, y ∈R and
 The real part of a complex number z = x + iy
is x, and the imaginarypart is y. Note
The real part of a complex number z = x + iy
is x, and the imaginarypart is y. Note
that i^2 = −1.
Two complex numbers are said to be equal, a + ib = c + id, if and only if a = c and b = d.
We add two complex numbers by their real and imaginary parts respectively:
(a + ib) + (c + id) = (a + c) + i(b + d)
Multiplication of two complex numbers a+ib and c+id is performed by multiplying the binomials:

Definition 27 The complex conjugate
 of a complex number z = x + iy is
of a complex number z = x + iy is

Definition 28 The absolute value of a complex number z = x + iy is

Note that

We can divide two complex numbers (a+ib) and (c+id) by using the complex conjugate as follows:

4.2 Polar coordinates
Complex numbers can be though of as as points in the xy-plane
with the x-coordinate being the
real part, and the y-coordinate being the imaginary part. We can also represent
points in the plane
in polar coordinates using a length r and angle θ where x = r cosθ and y = r
sinθ . Thus, we can
write a complex number as

Definition 29 The exponential of a complex number is defined as

This allows us to write any complex number in a polar form using the exponential function:


Multiplication and division of complex numbers written in
exponential form then becomes simply
a matter of using the exponential properties of adding and subtracting
exponents, respectively. For
example, we can compute
Note that the following complex exponential
representations of the numbers 1,−1, i,−i, for any
integer n:
The exponential representation can be useful for finding
complex roots of polynomials. For example,
consider finding the roots of  n and solve
the equation
n and solve
the equation

which results in the two equations:
where n is an integer. Since we have a polynomial of
degree 3, we are looking for 3 complex roots
so we consider n = 0, 1, 2. This gives us  The three roots of x^3 − 2 = 0
The three roots of x^3 − 2 = 0
are then:
5 Eigenvalues and Eigenvectors
5.1 Eigenvalues
Definition 30 An eigenvalue of the n × n matrix A is a scalar λ such that

for some n × 1 column vector x.
Alternatively, an eigenvalue is a scalar λ such that the equation

has a nonzero solution x. In order for this equation to
have a nonzero solution, the matrix A − λI
must not be invertible, thus

Computing this determinant for the matrix A−λI yields a
polynomial in which in general admits
complex roots.
Definition 31 The characteristic polynomial of a
matrix A is the polynomial in λ obtained
from computing the determinant

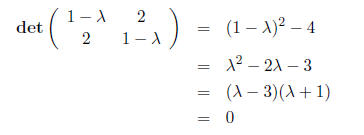
For example, if A is a 2 × 2 matrix
we can find the eigenvalues of A by computing det(A − λI)
= 0 which gives us the characteristic
polynomial

which can be solved using the quadratic formula.
5.2 Eigenvectors
Definition 32 An eigenvector x associated with an
eigenvalue λ is a nonzero solution to the
equation

Finding eigenvectors for a particular eigenvalue λ is then
equivalent to finding the kernel of the
matrix (A − λI).
5.3 Examples
Consider the matrix
First, compute the eigenvalues by solving

to get
and thus the eigenvalues are
 . To find the eigenvector
. To find the eigenvector
 associated with
associated with
 ,
,
compute the kernel of the matrix

We want to find numbers  such that
such that
This results in the the equation
 which has a solution anytime that
which has a solution anytime that

We can express this solution as
or simply as any scalar multiple of
Similarly, for the second eigenvalue
 we want to find numbers
we want to find numbers
 such that
such that

which gives us the solution
 , and thus any scalar multple of
, and thus any scalar multple of
or simply
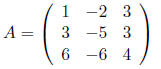
Now, let’s consider the 3 × 3 matrix
and find its eigenvalues and eigenvectors. By computing
the determinant det(A − λI) we obtain
(after some work) the characteristic polynomial of A

which has roots  Thus,
there are only two unique eigenvalues
Thus,
there are only two unique eigenvalues
because −2 is repeated.
To find the eigenvector associated with
 , we find the kernel of the matrix
, we find the kernel of the matrix
 by finding
by finding
(x, y, z) such that
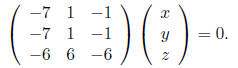
This yields the equations x = 0 and y = z, so the
eigenvector associated with the eigenvalue λ = 4
is any scalar multiple of

Plugging the other eigenvalue
 and solving for the eigenvector gives us
and solving for the eigenvector gives us
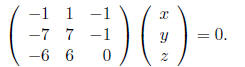
This gives us the equations z = 0 and x = y, so the eigenvector is any scalar multiple of

but this leaves us with only two eigenvectors for a 3 × 3
matrix. The last eigenvector in this case
is then the trivial vector

5.4 Determinants and eigenvalues
If you have the eigenvalues of a matrix, then you know its
determinant by simply multiplying the
eigenvalues together.
Theorem 11 If A is a n×n matrix, and
 are the eigenvalues of A (counting multiple
are the eigenvalues of A (counting multiple
eigenvalues), then

For example, consider the matrix
which has the characteristic polynomial
 Then, using the theorem
Then, using the theorem

6 The Big Theorem
Now, we tie together all of the previous sections into one big theorem. This is very important
Theorem 12 If A is an n × n matrix, then the following are equivalent:
1. A is invertible
2. det(A) ≠ 0
3. kernel(A) = 0
4.  has a unique solution
has a unique solution
5. the rows of A are linearly independent
6. the columns of A are linearly indepdent
7. all of the eigenvalues of A are nonzero
What this means is that all of these conditions are
equivalent: if you know condition is true, then
they all are true; or if one condition is false, then they all are false.